
§ 3.04 · NCA
NCA Ecology — emergence under learned rules
Rules → emergence, amplified by AI as a structural component within the rule system itself.
Rules → emergence, amplified by AI as a structural component within the rule system itself.
The leverage of this path sits one level above thermodynamics. Entropy and free energy are useful organising languages, but the substantive move is to define dynamics by writing constraints rather than by writing equations.
Once a constraint is autodiff-friendly, SGD will search for a rule that satisfies it, even if the constraint cannot be packaged into a partial differential equation. That opens the door to objects no PDE language can express — trajectory statistics, cross-scale mutual information, topological invariants, and quantities defined by other learned models.
why constraint geometry
────────────────────────────────────────────────────────────────
classical PDE this project
────────────── ────────────────────
write the equation write the constraints
integrate SGD searches a rule
that satisfies them all
reaches reaches
= equations humans have = any autodiff-friendly
written down function, including
PDE-unwritable ones:
· trajectory statistics
· cross-scale information
· topological invariants
· learned perceptual losses
the second column is where the project tries to live.Three foundational papers cover most of the mechanism stock for this territory: Self-Organising Textures (Niklasson 2021) for statistical losses producing manifold attractors, Particle Lenia (Mordvintsev 2022) for local-energy dynamics, and Flow-Lenia (Plantec 2023) for architectural mass conservation.
The triple intersection — statistical loss × open systems × architectural conservation, aimed at physical-style dissipative structures — sits empty.
┌──────────────────────┐ ┌──────────────────────┐ ┌──────────────────────┐
│ Self-Organising │ │ Particle Lenia │ │ Flow-Lenia │
│ Textures │ │ Mordvintsev '22 │ │ Plantec '23 │
│ Niklasson '21 │ │ │ │ │
└──────────┬───────────┘ └──────────┬───────────┘ └──────────┬───────────┘
│ │ │
statistical loss local energy architectural
→ manifold attractor minimization conservation
(reintegration tracking)
│ │ │
└─────────────────────────┼─────────────────────────┘
│
┌─────────────┴──────────────┐
│ this project │
│ · statistical loss │
│ · open systems │
│ · architectural cons. │
│ │
│ target: physical-style │
│ dissipative structures │
└────────────────────────────┘A neural cellular automaton is a tiny update rule (≈8 K parameters) applied locally to every grid cell, run for many steps, and trained end-to-end through the rollout. The interesting design surface is the loss — the kernel will learn whatever physics that loss requires it to preserve.
What makes this path different from a Houdini PDE solver is that the loss can target objects an Euler–Lagrange machinery cannot express. SGD reaches them; closed-form variational physics does not.
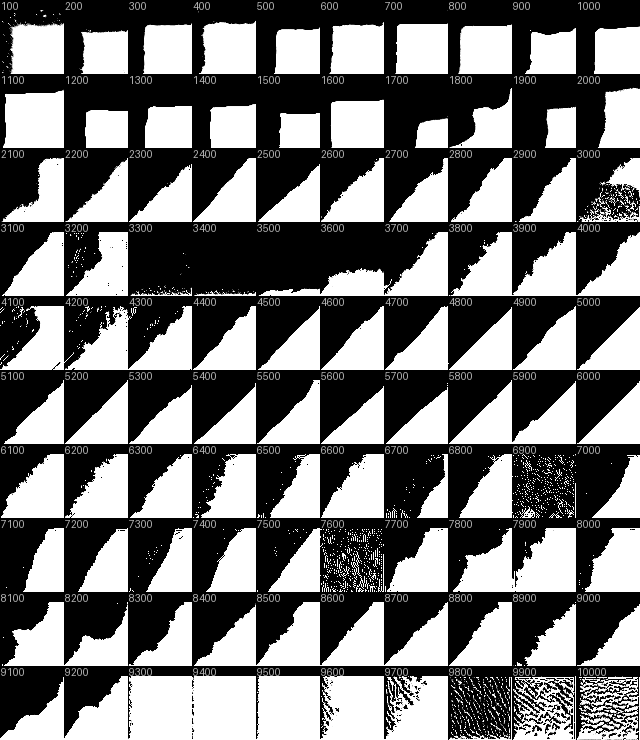
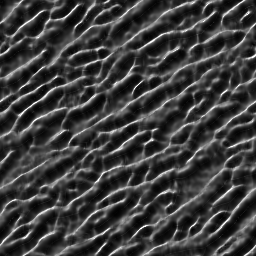
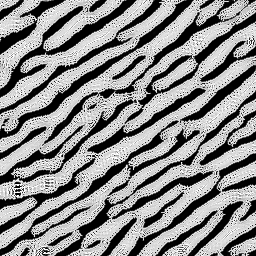
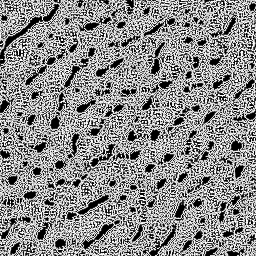
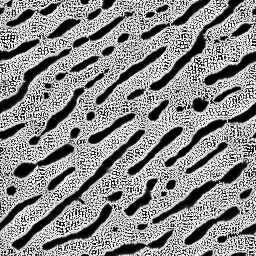
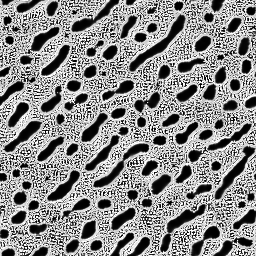
The first attractor with internal time. Dunes that move.
Three-term loss (heterogeneity, anti-stasis, soft conservation) on a residual ΔM update. Twenty experiments around this configuration. Ceiling reached: a moving-dune texture. Used as the baseline against which every later loss tension is measured.
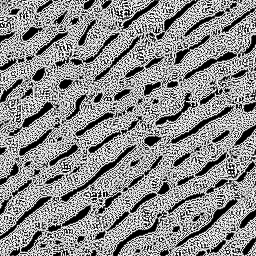
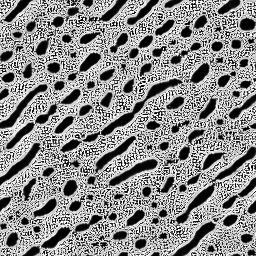
Horizontal bands, slow drift.
Channels are given physical identity (M for mass, V for velocity). Loss becomes an advection–diffusion tension pair. Linear advection meets quadratic Dirichlet — small ∇M is dominated by advection (structure grows), large ∇M by Dirichlet (growth caps). First time the kernel learned a non-trivial physics over named channels.
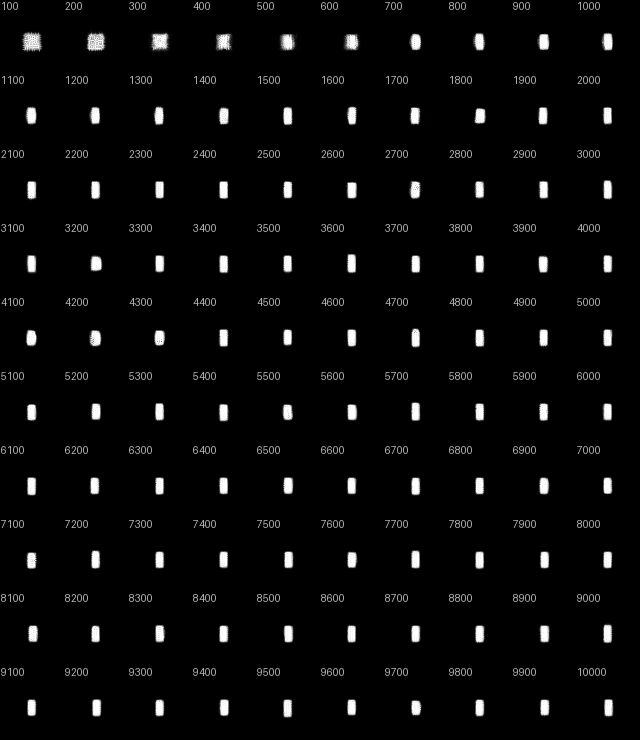
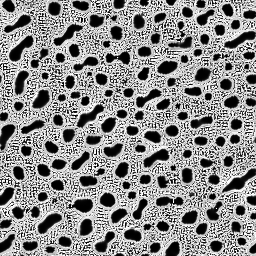
A small capsule. Same shape under any seed offset.
Conservation moved from a soft penalty into the architecture (reintegration tracking transport). Same tension-pair philosophy, different substrate. Result: a translation-invariant spatially-localized pattern — top 5% of pixels hold 100% of mass; cross-position correlation 0.99+ inside the training distribution. The 'sand-dune ceiling' claim only held for ΔM-residual architectures.
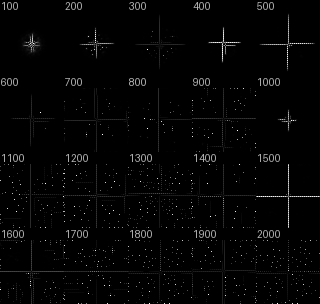
A four-armed cross grows out of a small seed.
A second conserved field R is added; Σ(M+R) is bit-exact. The kernel learns to convert R into M and grows a dendrite. The dendrite locks strictly to cardinal axes — an instability of sharp U fields under Mullins–Sekerka geometry, verified by self-consistent PDE substitution where the kernel drops out and the four-fold lock disappears. Open problem K1 — see §05 below.
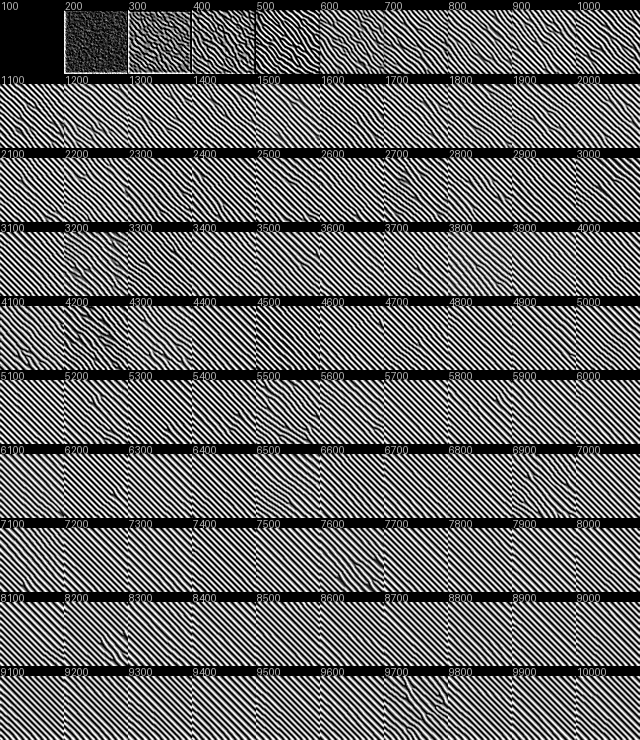
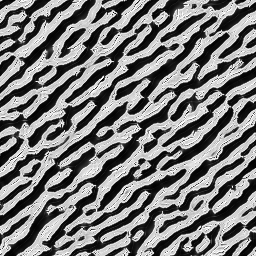
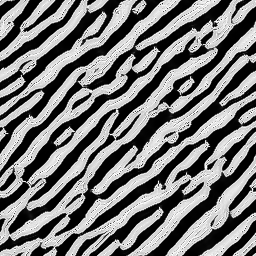
A maze with multi-pixel walls.
Free-energy loss replaces the tension-pair. The bare A0 form collapses labyrinths to single-pixel walls. Adding a double-well term and a Dirichlet term restores a controllable interface width. The same 64² checkpoint runs unchanged at 1024² — line widths are scale-invariant, full inference at 1024² takes 71 seconds.
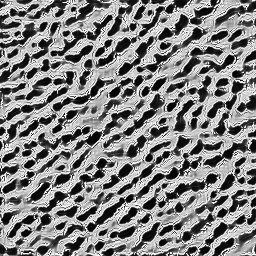
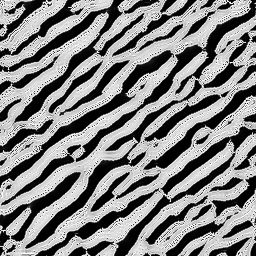
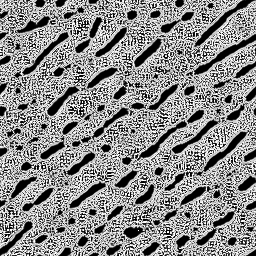
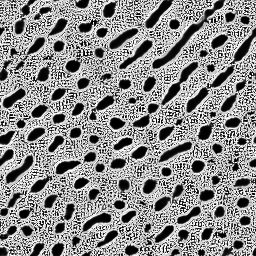
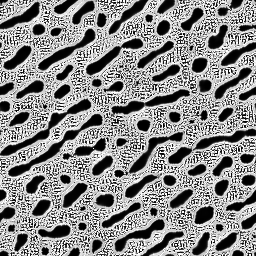
30–60 px worms flowing across the canvas.
DyNCA-style multi-scale perception: the same DoG kernel applied at scales 1, 2, 4, 8, 16, summed before the MLP. Worms grow from 5–10 px (no pyramid) to 30–60 px. Phase-separation indicator f0+f1 = 0.60. Currently the most cinematic attractor in the project.
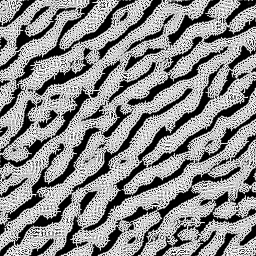
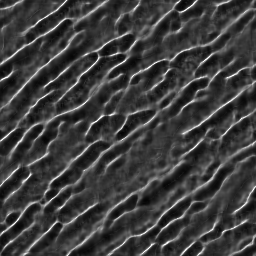
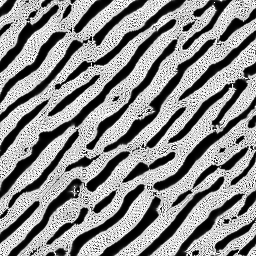
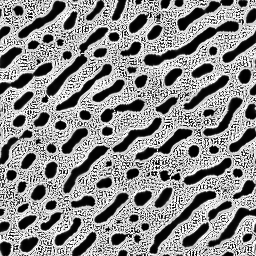
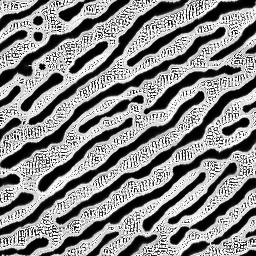
Same rule, four environments, four worlds.
Environment heterogeneity is injected after every NCA step (R = relu(R + α · fBM)), with the loss left untouched. Four warm-started checkpoints diverge into four distinct attractors as α scales. The first literal evidence that the same learned rule traces different trajectories under different ambient fields. Frontier as of 2026-04-17.
Three long-running directions sit downstream. Multi-scale perception is now mostly engineering — the pyramid setup landed in 8.6. Source/sink design is in active calibration via the env-injection track. The third — losses on objects that PDEs cannot express — is the line that takes the project furthest from PDE/Houdini territory. The order they ship in is loose.
┌──────────────────────────────────────────────────┐ │ │ │ third diagram · content TBD │ │ │ │ candidates │ │ · project timeline (phases 0 → 8.6) │ │ · long-term direction matrix (A / B / C) │ │ · loss-design taxonomy │ │ │ └──────────────────────────────────────────────────┘